Simulating a mobility revolution

Testing connected and autonomous vehicles doesn’t begin on the road – the latestmodeling software can create accurate virtual worlds that enable vehicle manufacturersand traffic managers to explore the limits of the technology in order to enable saferreal-world deployment.
The prospect of thewidespread use of connectedand autonomous vehicles(CAVs) is drawing closer,and the role of simulation intransportation planning, designand engineering has never beenmore vital. In an arena with so manyunknowns, simulation is perfectlysuited to testing: it provides a safe,risk-free environment that isextensible and flexible enough tocope with changing parameters anda multitude of variables, but that also has the power to analyze manyscenarios in a matter of minutes.
There are two main perspectiveson this: vehicle manufacturers wantto use simulation as a debuggingenvironment, to run virtual testswith software- and hardware-inthe-loop, to see how their productsare going to perform in the network;public administrators want to testthe impact of that technology andforecast the consequent changes andinvestments in mobility management.Both want to test these connectedvehicle developments under differentroad traffic conditions, where theremight be incidents of differentproportions of CAVs in the nationalfleet, and establish what mighthappen if transmission becomes lessreliable. All of these are hard to test on the road at present, but canbe tested in simulation.
Software solutions
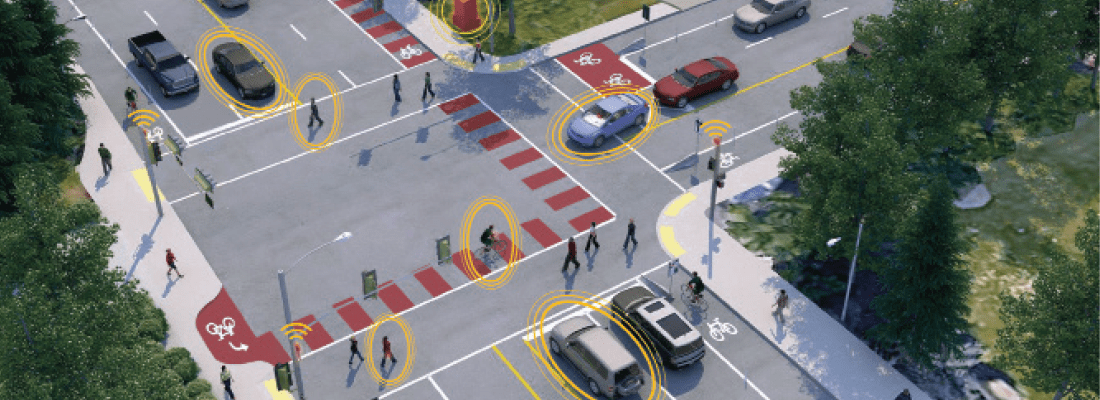
Aimsun Next software provides aset of tools for investigation into theuse of vehicle-to-everything (V2X)connectivity. The new, extensibleV2X Software Development Kit(V2X SDK) can help researchersdesign innovative systems basedaround connected vehicles andenable them to test future urbantraffic management systems, in-carinformation tools and autonomousvehicle controls.The V2X SDK features the mostcommon V2X message types definedin EU or North America (protocolssuch as CAM – CooperativeAwareness Message; DENM –Decentralized Environmental Notification; and SPaT – SignalPhase and Timing) and allows theadjustment of transmission rangeand probability of successfultransmission that simulates thephysical and network layers of aVehicle Ad-hoc Network (VANet).This makes it possible to testvirtually any connected vehicleapplication, implementing theresulting actions at the level ofa single vehicle, the immediatevicinity, or even network-wide.

The V2X SDK is designed tobe readily extended to addnew technologies andmessages as they emerge;an environment with theflexibility to work withvehicle behavior thatranges from detailedcollaboration betweenconnected and autonomousvehicles, to showing a driverinformation in the hope ofeliciting a reaction. You only haveto write some code for the onboardunits (OBU), for the roadside units(RSU) and/or for the trafficmanagement center (TMC) that, atevery time step in the simulation,processes the list of messagesreceived by each device, and definesthe action to take (e.g. for an OBU, setthe speed of the vehicle; for an RSU,change the duration of the current phase; for a TMC,provide a route to anemergency vehicle).
The simulationalso needs to operateat different scales. Inone scenario, a modelermay want close-up detailfor a single intersection, to testhow fast driverless vehicles canpass through. Then, in anotherscenario, the modeler may wantto test pollution levels using dataaggregation across a large network.Modeling at an appropriate scale,from a single junction to a city-wideroad network, is an important partof what Aimsun Next is able todo with integrated macro-, mesoandmicro-models. The design ofthe V2X SDK in Aimsun Next, withits inherent extensibility andflexibility, is just a part of thesame philosophy.
CAV pilot projectsInnovate UK is funding three major CAV pilots using Aimsun software
Aimsun’s new V2X SDKmodeling software was developed within the InnovateUK Flourish project.
This is athree-year, £5.5m (US$7.7m)project launched in June 2016that is very much focused onCAVs in an urban environment,seeking to develop productsand services that maximizethe benefits of CAVs for usersand transportation authorities.
A second CAV project, ledby Aecom in the UK, is calledConnected & AutonomousPod on-Road Implementation(CAPRI). CAPRI aims to design,develop and test a connectedand autonomous pod formoving people around airports,hospitals, business parks,and shopping centers, but willalso test how the networkcan harness data to enablelocation, positioning and on-demand services.It is anticipated that evidencecollected through the pilotwill provide sufficient detailto enable and support a newvehicle classification for thepods.
In addition to impactassessment and assistingin the design of managementstrategies for the use of podsat the Olympic Park in London,Aimsun will also be playinga role in the verification andvalidation of the pod controlsystems, enabling safetyevaluations in a controlled,risk-free virtual environment.
A third UK CAV project isHumanDrive, within whichAimsun is simulating theeffects of autonomous vehiclesin mixed traffic (that is, carswith and without drivers) onthe strategic road network. This30-month autonomous vehicleproject is led by Nissan’sTechnical Centre Europe, asa part of Renault-NissanAlliance research activities,and will culminate in the mostcomplex journey yet attemptedacross the UK without driverinput. The HumanDrive vehiclewill deal with a variety of UKdriving scenarios, includingcountry roads, high-speedroundabouts, A roads, andhighways in live traffic andin different environmentalconditions.
The Aimsun Next simulationenvironment will be used toevaluate the performance ofdifferent types of CAVs alongwith strategies for their useand management; this will notonly help with understandingof their impact on capacity,but also on emissionsand safety.
Words | Gavin Jackman, Aimsun, Spain
Share your story
Do you have an innovation, research results or an other interesting topic you would like to share with the professionals in the infrastructure, traffic management, safety, smart mobility and parking industry? The Intertraffic website and social media channels are a great platform to showcase your stories!
Please contact our Sr Brand Marketing Manager Carola Jansen-Young.
Are you an Intertraffic exhibitor?
Make sure you add your latest press releases to your Company Profile in the Exhibitor Portal for free exposure.
.png?h=628&iar=0&w=1200)

Get up to speed on the mobility industry - our newsletter straight to your inbox!